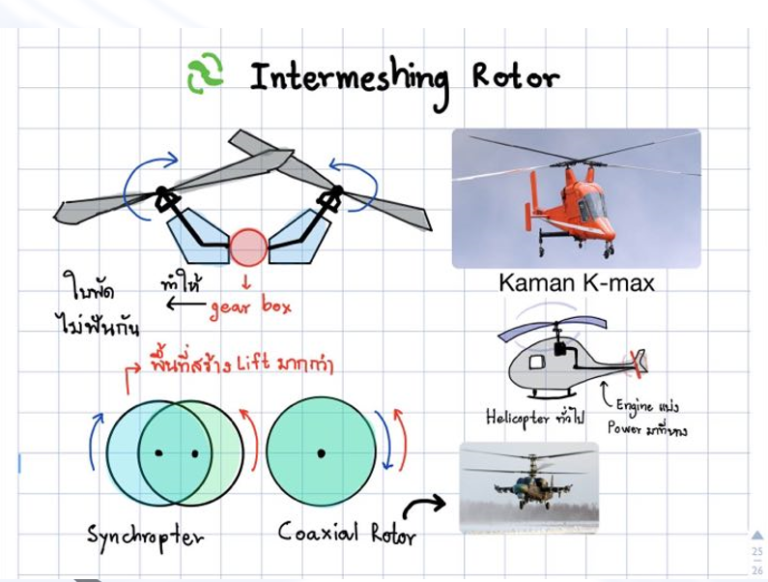
แล้วทำไมไม่ทำเป็นแบบ coaxial rotor ดังในรูปต่อไปนี้ล่ะ ก็แก้ torque ได้เหมือนกัน?
(แบบที่ใบพัดมี 2 ชั้น ใช้แกนเดียวกัน โดยใบพัดหมุนสวนทางกันดังในรูปด้านล่างขวา Co = ร่วม Axe = แกน)
คำตอบคือ การติดตั้งใบพัดแบบ synchropter นั้นจะให้พื้นที่ในการสร้างแรงยกของใบพัดที่มากกว่า พิจารณาตามรูปด้านบนครับ หากเราติดใบพัดสองอันเอียงออกจากกัน แล้วมองมุมบน (top view) จะเห็นพื้นที่ใบพัดของ synchropter ที่มากกว่านั่นเองและการสร้าง แรงยก ก็จะทำได้มากกว่าครับผม